Sensor Information
RPLiDAR

The RPLiDAR is a single beam 360 degree Light Detection and Ranging (LiDAR) sensor from Slamtec. We are using the A1 model from Slamtec that has the following specifications:
12m Range
360 Degree
8000 per time samples
5.5 Hz
Angular Resolution is 0.5 degree
A picture of how the array of ranges are given is given below:
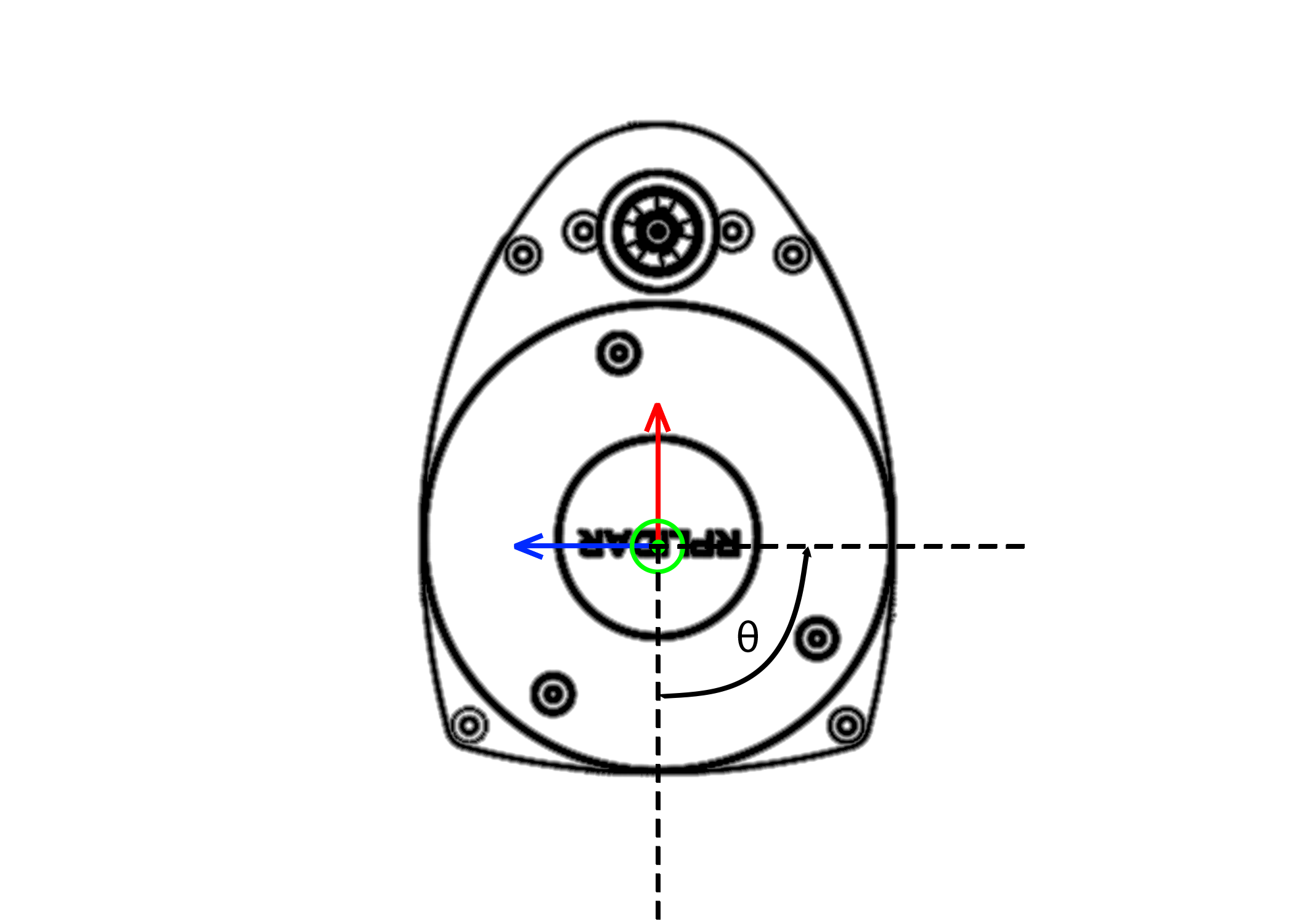
As seen above, the RPLiDAR ranges data starts from the -x and rotates counter-clockwise and has a 0.5 degree step size. Therefore your ranges[] array would
be 720 long in size.
GPS

The GPS unit we are using is a uBlox NEO6M GPS module on a HiLetgo breakout board. The GPS uses NMEA strings to communicate with the Odroid UART port. Essentially, we open a UART connection to the GPS unit and get back the Latitude and Longitude information for the sensor. We have it set to RMA information, but it can be set to others. Check the datasheet to see all it can do.
IMU
- The 9-Axis IMU, BNO055 is currently being used. The sensor has a accelerometer, gyroscope, and magnetometer.
It is part of the Arduino Nano Motor Carrier.
Magnetic Encoders
The vehicle chassis are currently equiped with two hand made magnetic encoders (hall effect).